GPIO
目录
GPIO
GPIO 基本概念与 CubeMX 配置流程
GPIO (General Purpose Input/Output) 是微控制器与外部硬件进行交互的基础接口。在 STM32 中,每个 GPIO 引脚都可以独立配置为不同的模式和功能。
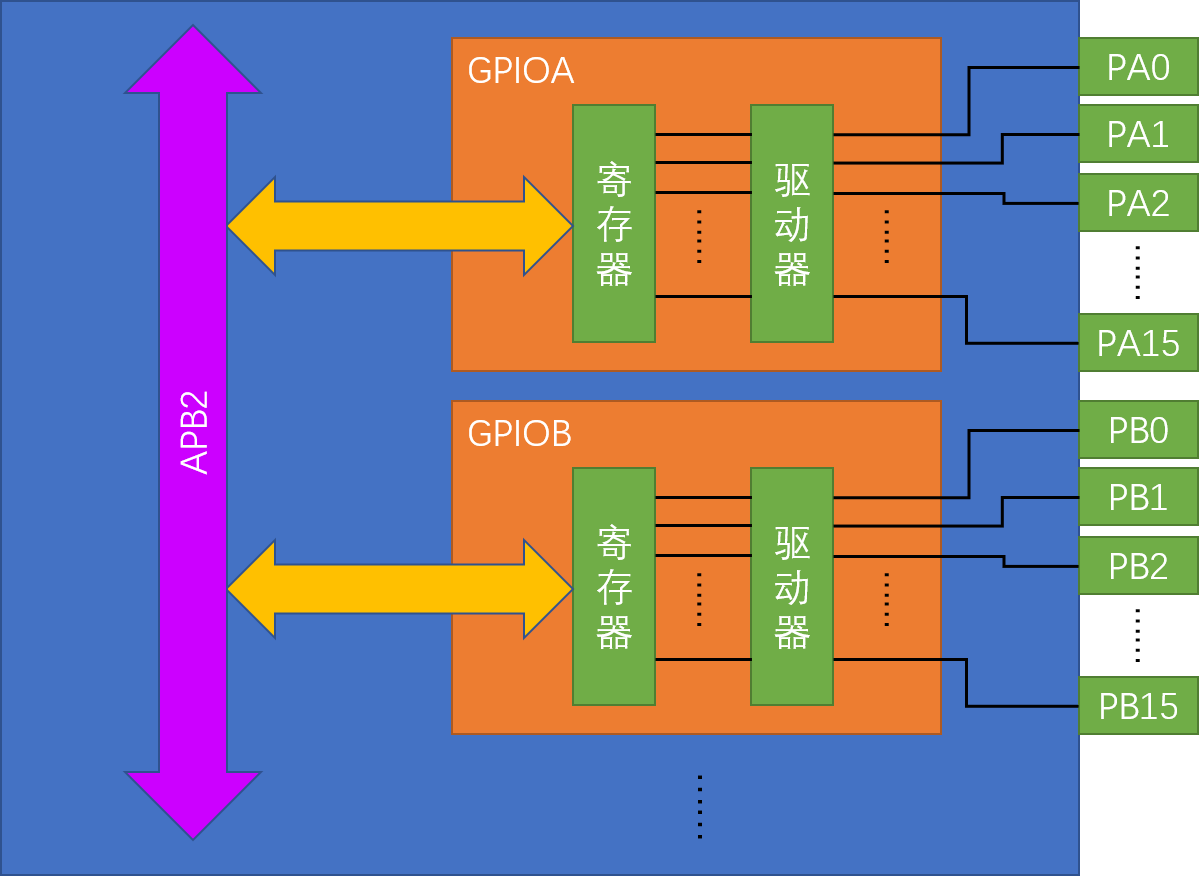
GPIO结构
片上结构
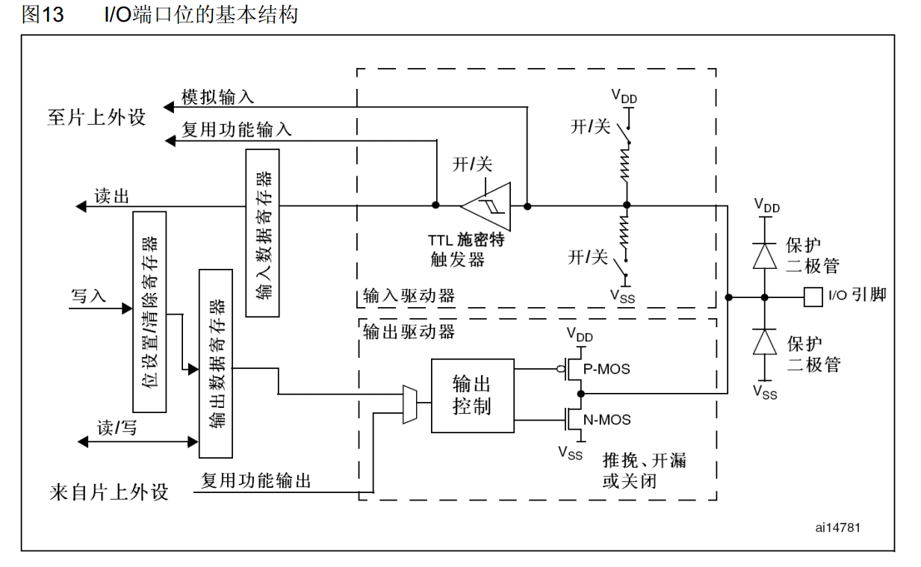
位结构
CubeMX 配置流程
STM32CubeMX 是一个强大的图形化配置工具,用于生成初始化代码,极大地简化了 GPIO 的配置工作。
- 引脚模式选择:在芯片引脚图上,点击或右键点击要配置的引脚。
- 模式配置:选择所需的 GPIO 模式,例如:
- GPIO_Output:通用推挽输出或开漏输出。
- GPIO_Input:浮空输入、上拉输入或下拉输入。
- Alternate Function (AF):用于连接片上外设(如 USART、SPI、I2C 等)。
- Analog:用于 ADC/DAC 等模拟功能。
- 参数设置 (Parameters Settings):在左侧的 Pinout & Configuration 栏目中,选择 GPIO 选项卡。对每个启用的 GPIO 端口(如 PA, PB, PC...)进行详细配置:
- GPIO Mode:确认引脚的输入/输出/复用功能。
- Pull-up/Pull-down:设置上拉/下拉电阻(适用于输入模式)。
- Maximum Output Speed:设置输出速度(Low, Medium, High, Very High)。
- User Label:强烈建议为每个引脚设置一个清晰的别名(例如
LED_R_Pin,KEY_WKUP_Pin),这将直接反映在生成的 HAL 库代码中,提高代码可读性。
GPIO 工作模式
GPIO 有四大工作模式,CubeMX 中配置的是这些模式的子集:
- 输入模式 (Input Mode):用于从外部读取电平。可配置为浮空、上拉或下拉。
- 输出模式 (Output Mode):用于向外部输出电平。可配置为推挽(能输出高低电平)或开漏(只能输出低电平或高阻态)。
- 复用功能模式 (Alternate Function Mode):用于将引脚连接到芯片内部外设(如定时器、串口等)。
- 模拟模式 (Analog Mode):用于 ADC/DAC 等模拟信号处理。
HAL 库 GPIO 核心 API
HAL 库提供了一套简洁、统一的 API 来操作 GPIO,其函数命名通常遵循 HAL_GPIO_... 格式。
初始化
HAL_GPIO_Init(GPIO_TypeDef \*GPIOx, GPIO_InitTypeDef \*GPIO_Init)- 功能:初始化指定的 GPIO 端口和引脚。
- 使用方式:这个函数由 CubeMX 根据你的配置自动生成,并在
main.c中的MX_GPIO_Init()函数里被调用。你无需手动调用或修改它,除非需要动态重新配置。
输出操作(写操作)
-
HAL_GPIO_WritePin(GPIO_TypeDef \*GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState) -
功能:设置指定引脚的输出电平。
-
参数:
GPIOx:GPIO 端口(如GPIOA,GPIOB等)。GPIO_Pin:引脚号(使用 CubeMX 生成的别名,如LED_R_Pin)。PinState:电平状态(GPIO_PIN_SET为高电平,GPIO_PIN_RESET为低电平)。
-
示例(点亮 LED):
c HAL_GPIO_WritePin(GPIOB, LED_R_Pin, GPIO_PIN_RESET); // 假设低电平点亮 -
HAL_GPIO_TogglePin(GPIO_TypeDef \*GPIOx, uint16_t GPIO_Pin) -
功能:翻转指定引脚的输出电平。
-
示例(LED 闪烁):
c HAL_GPIO_TogglePin(GPIOB, LED_R_Pin);
输入操作(读操作)
-
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef \*GPIOx, uint16_t GPIO_Pin) -
功能:读取指定引脚的输入电平状态。
-
返回值:
GPIO_PinState类型(GPIO_PIN_SET为高电平,GPIO_PIN_RESET为低电平)。 -
示例(读取按键状态):
c if (HAL_GPIO_ReadPin(GPIOA, KEY_WKUP_Pin) == GPIO_PIN_RESET) { // 按键被按下(假设按键是下拉输入,按下时连接到 GND,读取低电平) }
外部中断(EXTI)与回调函数
对于按键等需要实时响应的输入,通常配置为 外部中断(EXTI) 模式。
EXTI基本结构
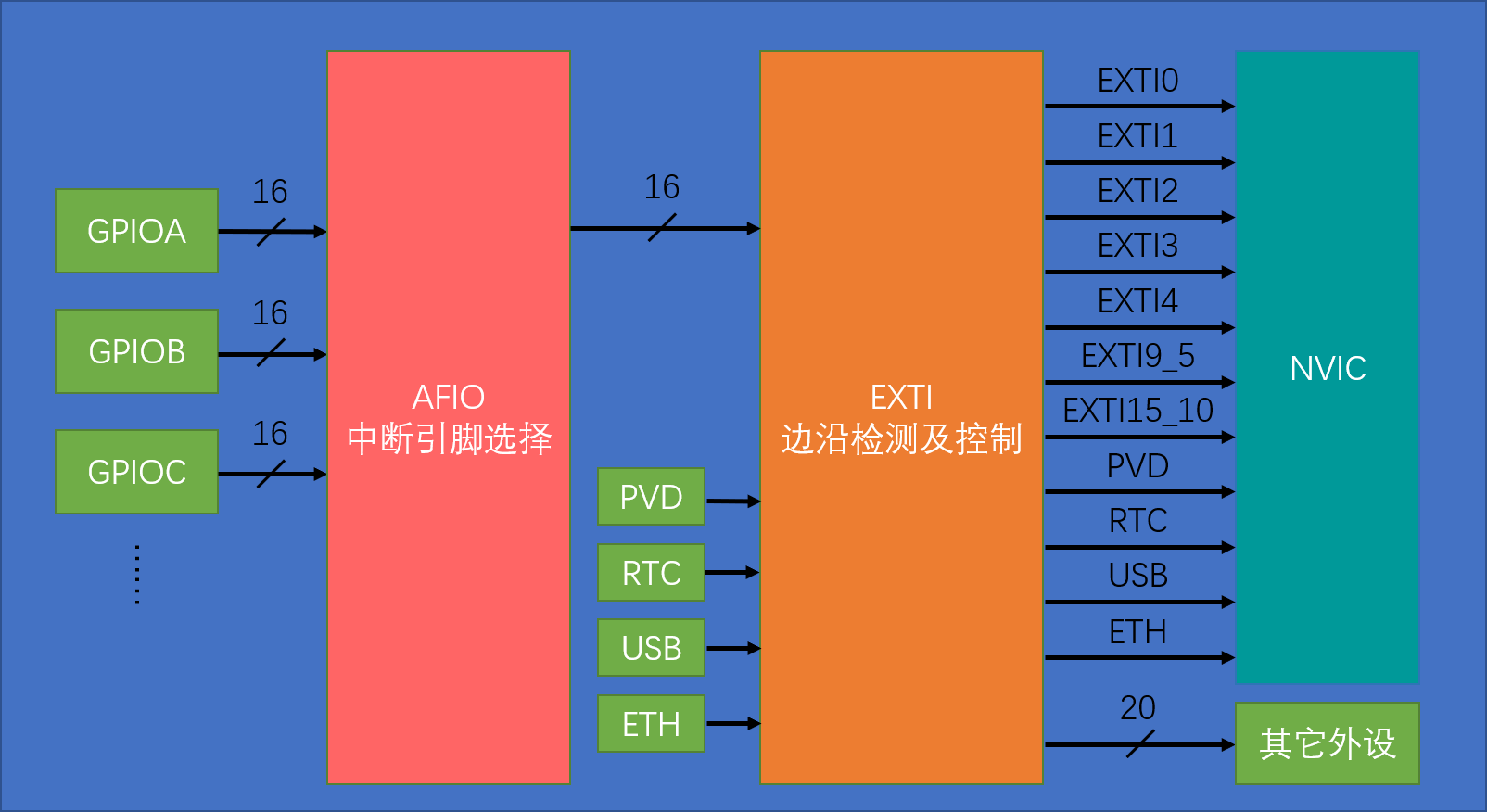
AFIO(复用IO口)说明
-
AFIO主要用于引脚复用功能的选择和重定义
-
在STM32中,AFIO主要完成两个任务:复用功能引脚重映射、中断引脚选择
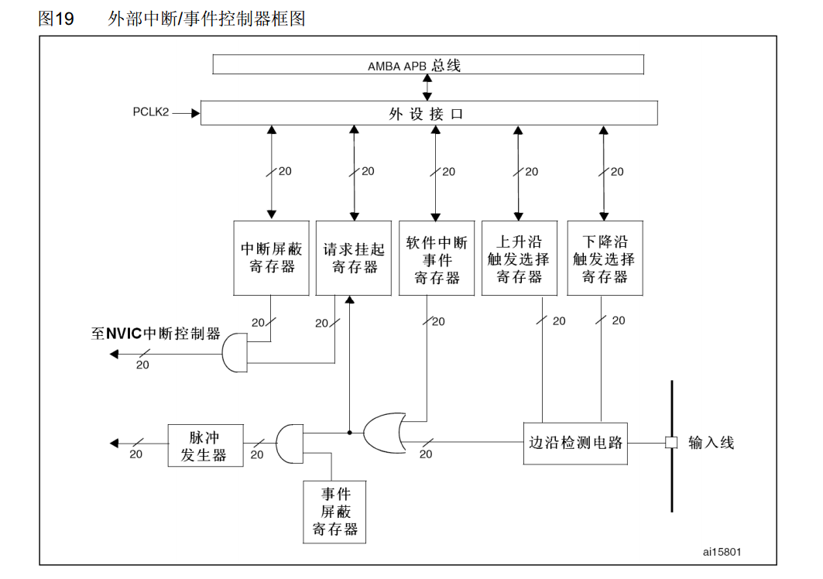
EXTI框图
EXTI 配置要点
- 引脚模式:在 CubeMX 中将引脚配置为 GPIO_EXTIxx(例如
GPIO_EXTI0)。 - 边沿检测:配置中断触发的边沿(上升沿、下降沿或双边沿)。
- NVIC 使能:在 NVIC Settings 中使能对应的 EXTI 中断线并设置优先级。
中断回调函数
- 你需要实现的函数:
c
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if (GPIO_Pin == KEY_WKUP_Pin) {
// 在这里编写中断触发后的处理代码
// 推荐:只设置标志位或发送消息,将耗时操作留给主循环
}
}
- 说明:中断触发时,HAL 库会自动执行中断向量表中的 ISR(在
stm32fxxx_it.c中),该 ISR 会调用一个通用的弱(__weak)回调函数。你只需要在你的代码中重写(实现)这个HAL_GPIO_EXTI_Callback函数即可。
说明
简而言之,HAL_GPIO_EXTI_Callback 对所有通过 GPIO 引脚触发的外部中断 (EXTI) 都有效。
它是一个 通用的、统一的回调函数,用于处理所有连接到 EXTI 线的 GPIO 中断事件。
HAL 库的抽象机制
HAL 库通过一种多层嵌套的函数调用结构,将底层不同的中断向量抽象成一个统一的回调函数,这就是为什么你只需要实现一个 HAL_GPIO_EXTI_Callback:
- 底层:硬件中断向量 (ISR):
你提到不同的外部中断有不同的中断向量,这是正确的。例如,STM32 F4 系列芯片中:
-
EXTI 线 0 对应一个向量(例如
EXTI0_IRQHandler)。 -
EXTI 线 1 对应一个向量(例如
EXTI1_IRQHandler)。 -
EXTI 线 10 到 15 共用一个向量(例如 EXTI15_10_IRQHandler)。
这些函数位于 CubeMX 生成的 stm32fxx_it.c 文件中。
-
中间层:HAL 库中断处理函数:
在每个底层的中断服务程序 (ISR) 中,会调用 HAL 库提供的具体处理函数,例如:
c
// 位于 stm32fxx_it.c
void EXTI0_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0); // 调用HAL库处理函数
}
HAL 库的这个处理函数会负责:
- 清除对应的 EXTI 挂起寄存器 (PR) 标志。
-
检查中断源是否真的被使能和触发。
-
顶层:通用回调函数:
HAL 库处理函数的最后一步,就是调用这个 弱(__weak) 声明的 HAL_GPIO_EXTI_Callback 函数,并将触发中断的引脚号作为参数传进去。
__weak关键字允许你在你的应用代码(如main.c或驱动文件)中重写这个函数。- 参数
GPIO_Pin:通过检查这个参数,你可以在一个回调函数中判断是哪个引脚触发了中断,从而执行不同的逻辑。
如何区分不同的中断源?
虽然回调函数是统一的,但你需要根据传入的 GPIO_Pin 参数来区分和处理不同的外部中断事件:
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if (GPIO_Pin == KEY_START_Pin) {
// 处理开始按键的逻辑
} else if (GPIO_Pin == KEY_STOP_Pin) {
// 处理停止按键的逻辑
} else if (GPIO_Pin == RFID_DET_Pin) {
// 处理 RFID 检测的逻辑
}
// 注意:无需手动清除挂起标志,HAL 库中间层已经处理了
}
注意事项
- 消抖 (Debouncing):对于机械按键,务必在回调函数中或在后续处理中考虑软件消抖逻辑,防止引脚抖动导致多次误触发。
使用了 CubeMX 后不用关心什么?
当你使用 STM32CubeMX 和 HAL 库进行开发时,CubeMX 已经为你处理了大量的底层配置和初始化工作。因此,作为应用开发者,你几乎不用关心以下这些细节:
| 细节类别 | 描述 |
|---|---|
| GPIO 时钟使能 | CubeMX 自动处理。 在 HAL_MspInit() 函数中,CubeMX 已经自动生成了 __HAL_RCC_GPIOx_CLK_ENABLE() 调用,确保在使用端口前时钟已打开。 |
| 寄存器地址与位操作 | HAL 库封装了。 你不需要直接操作 MODER、OTYPER、PUPDR 等寄存器来设置模式、类型或上下拉,只需使用 HAL_GPIO_WritePin() 等 API 即可。 |
| 底层初始化函数调用 | CubeMX 自动生成并调用。 MX_GPIO_Init() 函数会在 main() 函数中被调用。你无需关心它何时以及如何被调用。 |
| NVIC 向量表配置 | CubeMX 自动配置。 对于 EXTI,CubeMX 会自动配置并使能对应的 NVIC 中断通道,你只需要实现你的 回调函数 即可。 |
| 复位值 (Reset Value) | HAL 库负责初始化。 启动时 GPIO 默认处于模拟或浮空状态,但 HAL_GPIO_Init() 会将其设置为你在 CubeMX 中配置的状态。你不用关心启动时的默认状态。 |
总结: CubeMX 的目标就是让你专注于使用 HAL API(如 HAL_GPIO_WritePin、HAL_GPIO_ReadPin)和实现 回调函数(如 HAL_GPIO_EXTI_Callback),而不用花费时间处理底层寄存器的配置细节。